![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
- Start the remote program on the remote NXT.
- Establish Bluetooth link between both NXTs from the joystick (the link must be established from joystick, using slot 1 to use the programs without modifications)
- Start the joystick program
- Center the joystick
- Press trigger button
- You are now controlling the remote robot.
- Forward/Backward joystick value is sent as a signed value in mailbox 1
- Left/Right is sent as a signed value in mailbox 2
- Trigger button sends a message in mailbox 3
NXT
Joystick 

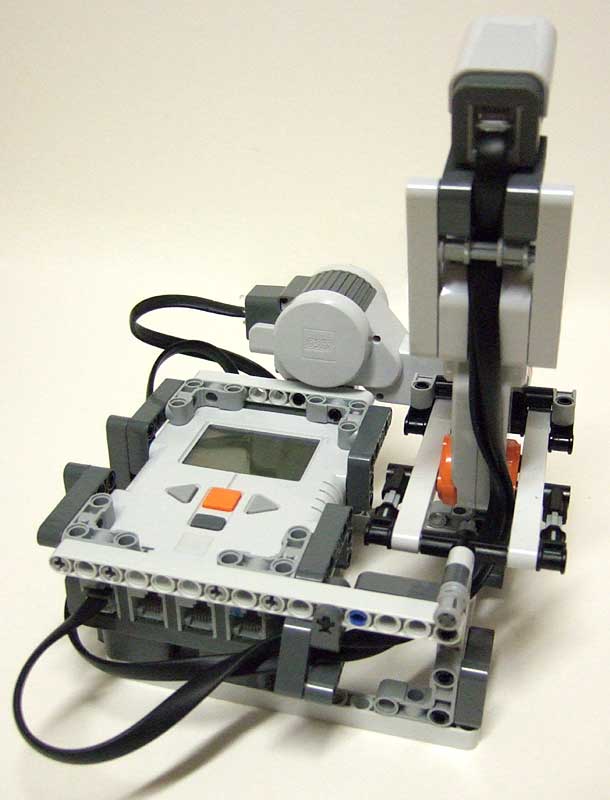
Needing some remote to control my spy rover, I built this joystick which controls the vehicle via Bluetooth. The motor topped by a touch sensor form the joystick arm, providing an ergonomic grip.
|
Motor encoders are used to read the position of the joystick. These values are sent to the controlled device through Bluetooth. A message is also sent to the remote device when the trigger button is pressed. |
|
The trigger button is also used at the beginning of the program to calibrate the joystick (set the zero position). It might also be used as a "shift key", to control two actions when the trigger is released, two other actions when pressed. |
|
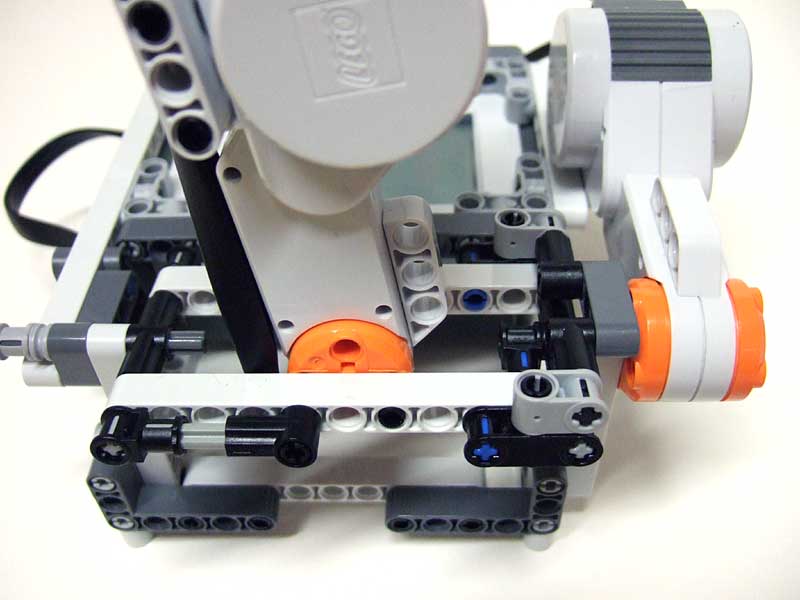
Both motors are directly coupled to the joystick arm, this increases precision by avoiding looseness (though some gear backlash inside the motors can't be avoided) |

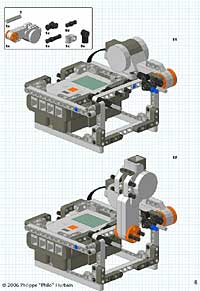
Building
instructions
|
Printable building instructions (PDF, 1.5Mb). LDraw/MLCad MPD file. |
Programs
These programs send the joystick position to a remotely controlled NXT robot.
Bluetooth mailbox usage:
|
"joystick" program (to be used with "Remote" program) |
|
"joystick-bidi" program (to be used with "Remote-bidi" program) is the same program with display and alarm when distance seen from remote ultrasonic sensor is too small. Unfortunately, changing direction of the Bluetooth link takes time, and the rover is much less responsive with this program (and harder to control). |
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()