![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
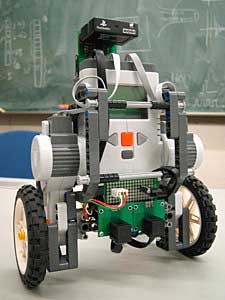
Get up, NXTway!

The inspiration for this robot is of course
Steve Hassenplug's Legway,
the world-famous self-balancing LEGO robot. The control program
is much more rudimentary than Steve's, but is sufficient for
NXTway to keep balanced for a while...
February 2007 update: Ryo Watanabe made an outstanding version of NXTway using a gyro sensor. Have a look to his very well documented realization: NXTway-G.
August 2007 update: Nathanael Wilson created building instructions for NXTway with LEGO Digital Designer

Presentation
|
NXTway, front and side. |
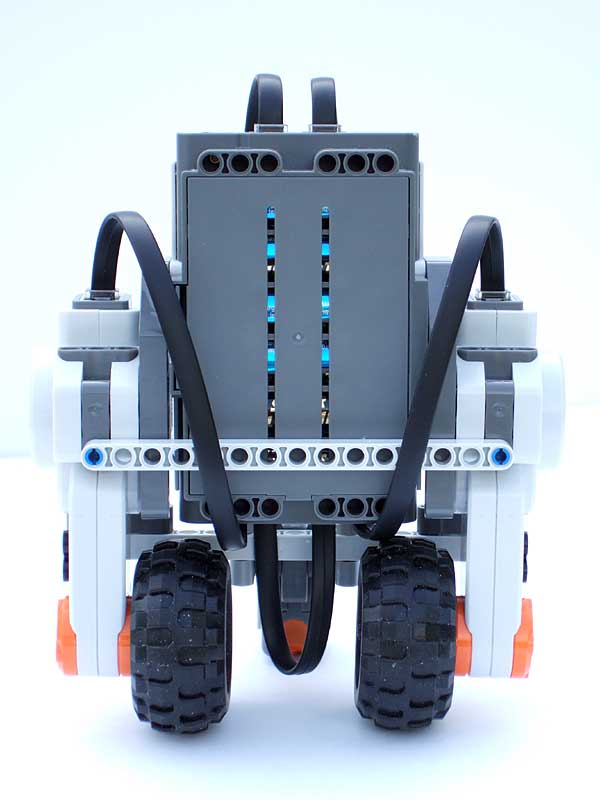
|
Rear and bottom views. |
|
NXTway equipped with short home made cables. |




- NXTway standing up for 1.5 minutes - warning: somewhat boring! (Divx5, 5.5 Mb)
- NXTway standing up for 1.5 minutes - reduced size and quality (Divx5, 1.1 Mb)
- Sometimes control diverges, and NXTway leaves camera field... (Divx5, 0.7 Mb)
Movies
|

Program
The control program was written using![]() and BricxCC.
You can get NXTway source program here.
You may need to modify some parameters to adapt to the sensibility
of your light sensor, especially the "scale" parameter.
and BricxCC.
You can get NXTway source program here.
You may need to modify some parameters to adapt to the sensibility
of your light sensor, especially the "scale" parameter.
|
If you can't or won't compile the program, here is the executable version. It must be sent to your NXT using the download button of the NXT program panel. As said above, this program is adapted to my light sensor and may not work well with yours. |
Construction
No
building instructions (yet) but it should be easy to build NXTway
from photos below.
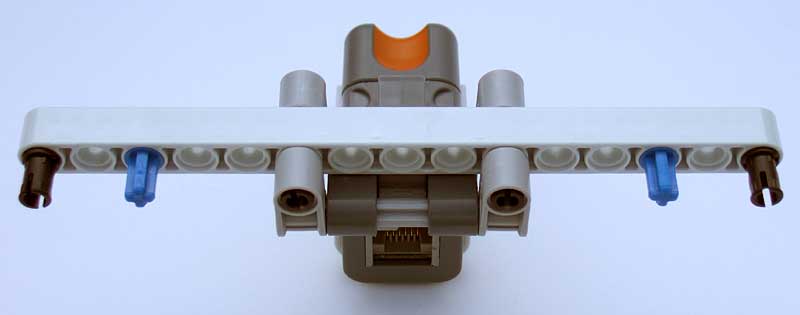
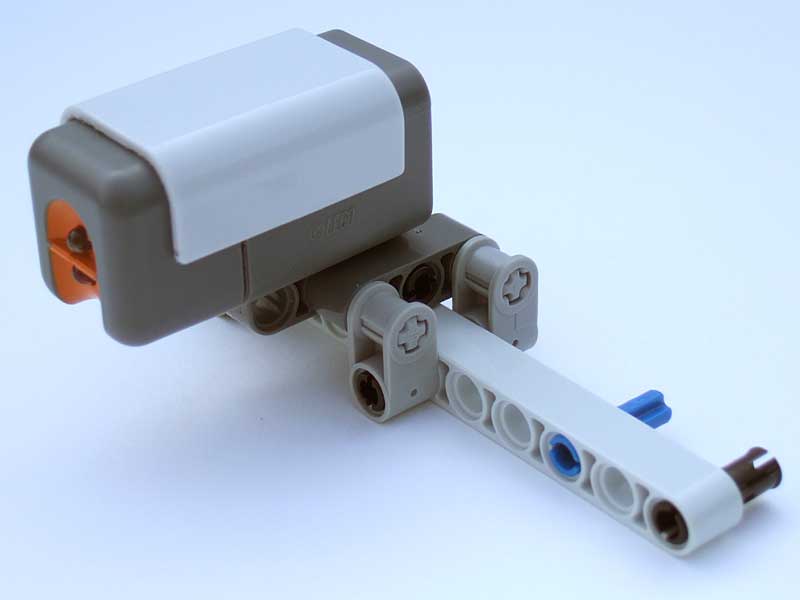
|
Light sensor assembly |
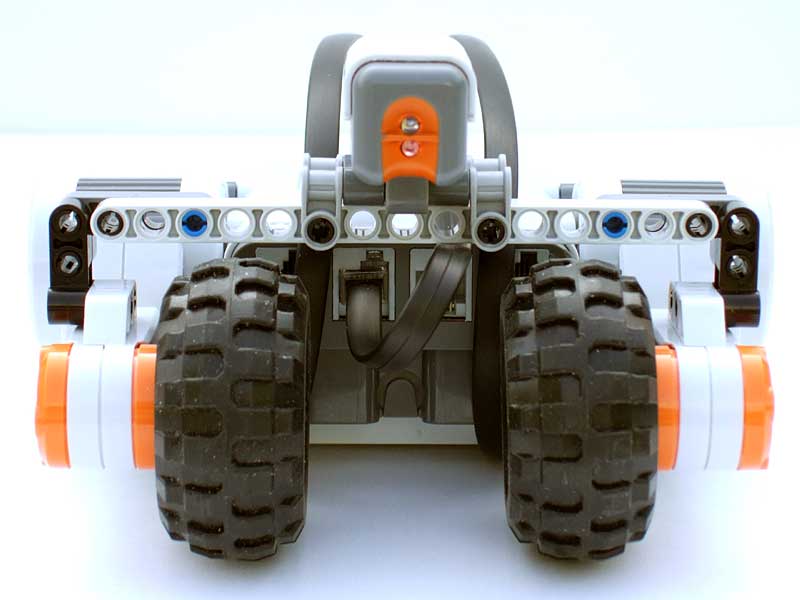
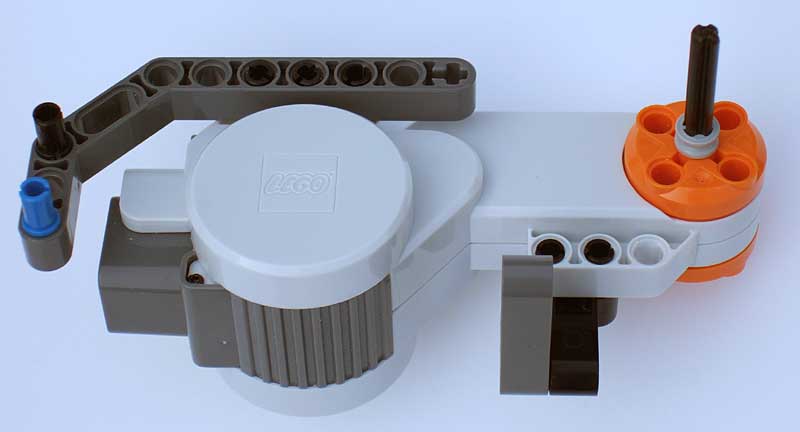
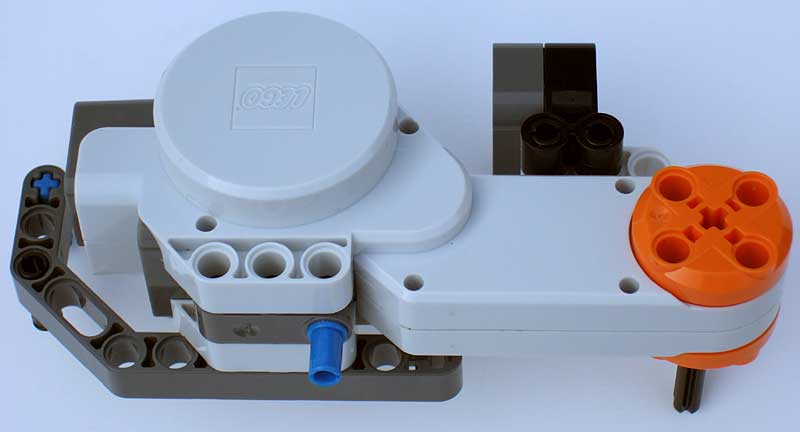
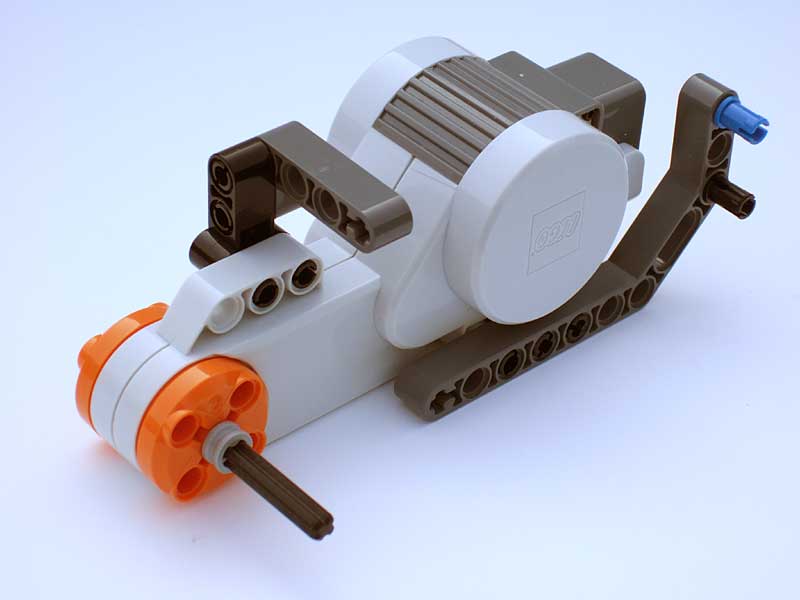
|
Motor assembly. |
- The lighting must not interfere with light sensor. Try your NXT in a dark room, or a room lit only by fluorescent light (fluorescent lamps emits little or no infra-red light so the light sensor is almost insensitive to their light).
- It works best on a clear but non uniform surface. Some patterns give NXTway something to "zero" on.
- When you press the run button, NXTway must be perfectly
balanced, as light level measured at that time determines
the equilibrium position.
Usage
In
its present state, NXTway is picky on environmental conditions:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()