![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
- The See-Saw in action
- Download the
 source
file of my best program.
source
file of my best program.
- See step-by-step instructions
- Download the LeoCAD design
file.
- Photo Gallery
The See-Saw
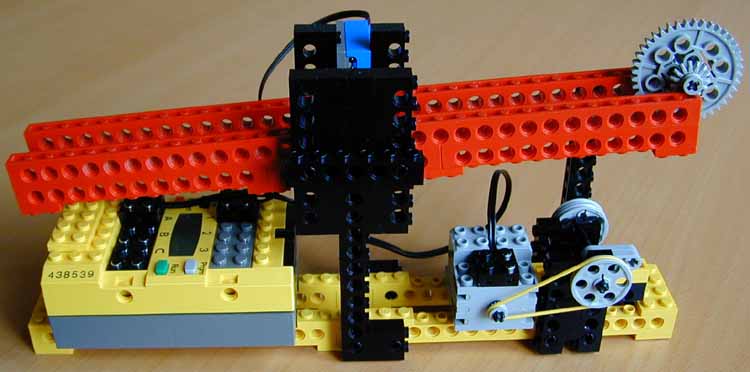
The mechanic part of the See-Saw is very simple, but the control program is an interesting challenge. The aim is to keep the wheel moving back and forth, as close as possible of the edges without falling. The only information available is the time at which the wheel crosses the light sensor beam. I don't know if this is sufficient to enable stable control. In the long run all my attempts let the wheel fall down.
If you find a better solution please let me know !
Sept. 2000 update : Claude Baumann and his team worked on this problem and provide a thorough analysis of the physics of the see-saw with an application program, along with slight modifications to enhance reliability. You can see this on http://www.restena.lu/convict/Jeunes/Seesaw.htm. Don't forget to visit their whole site, there are many very interesting things ! |
I had the idea of this device while visiting Lego Roller Coasters web page.
See an animated GIF (550K) |
|
or a Java Animator9 movie (70K) |
|


![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()