![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
P'titgneugneu
the stair climber
|
P'titgneugneu
won the |

|
Here is my entry for the Mindstorms COMMUNITY CONTEST # 3: Stairs. Ptitgneugneu's name is a tribute to Grogneugneu, a huge six-wheeled vehicle designed by my friend Richard "Vauban", that should be able to climb stairs (among other things) when it is finished. We had a lot of talks about technical solutions to perform this kind of task. Now why did he named his robot Grogneugneu is another story, too long to explain here... (those who can read French can see that story here). |
|
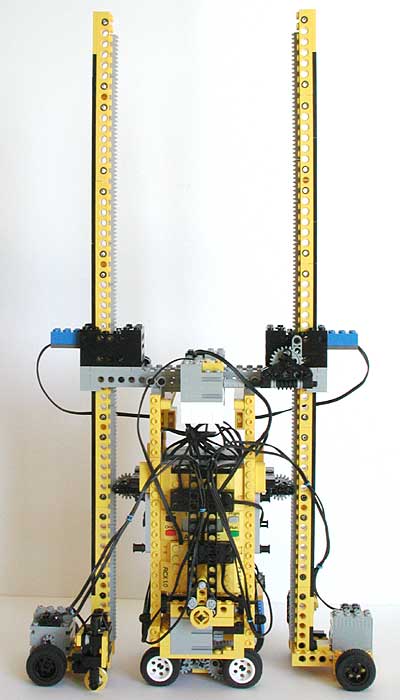
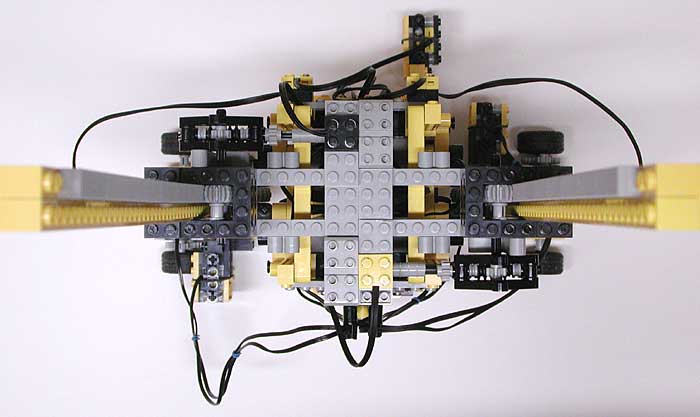
The climber is composed of a central part, holding two RCX, and two bars equipped with gear racks that can be raised or lowered to adapt the shape of Ptitgneugneu to the stairs. Below the central part is a rotating platform that enable steering. Six motors power the robot, 3 (one in each part) are used for moving, one is used for steering, the remaining two for raising/lowering bars. On this image you can also see the rubber-loaded bar that maintain tension on the wires to avoid entanglement. |
|
Top view. Dizzy, isn't it? This robot was a more a quick hack than a careful construction, for example the bars are not centered on the middle part. Bars guiding is also quite weak, slides on sides would have been much better. Oh well, that did the job! |
|
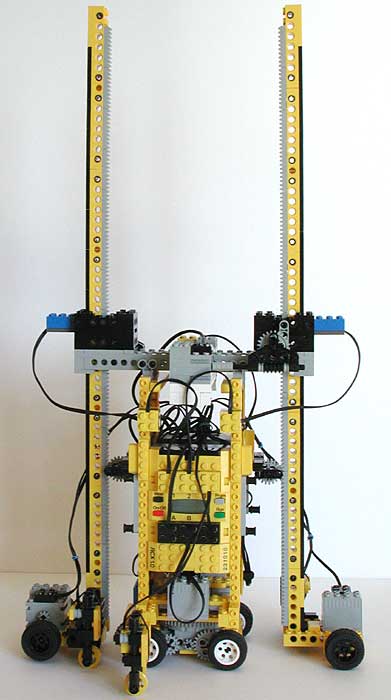
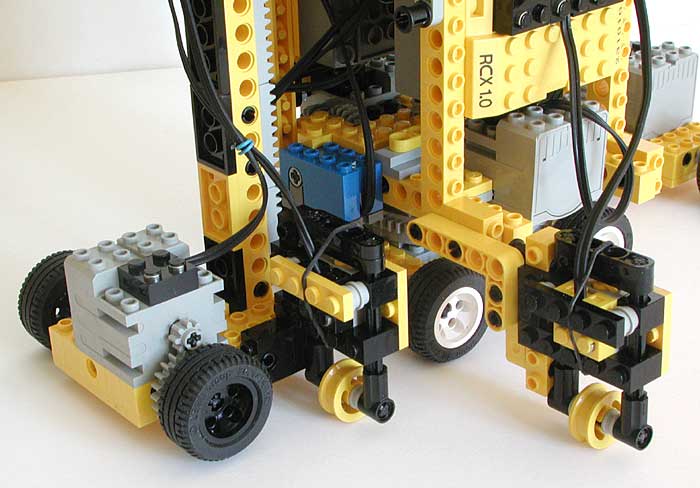
Each of the three parts is equipped with a ground detector (small yellow wheel) acting on a touch sensor. |
|
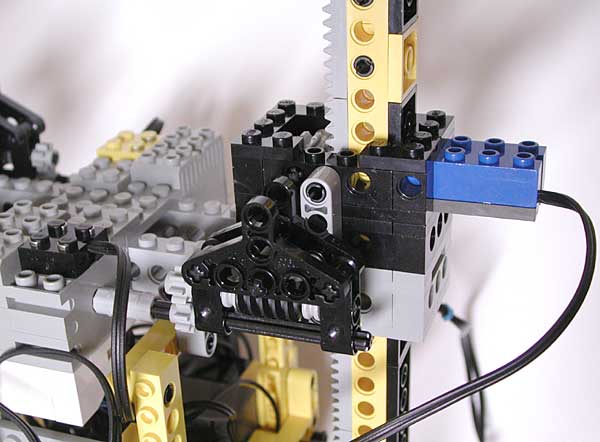
The bar lifting mechanism needs to be powerful (the middle part weight more than 1 kg), so I originally used a 1/24 gear reduction using a worm screw and 24 tooth gear. But the result was excruciatingly slow: almost 10 minutes to do the full stair trip. |
|
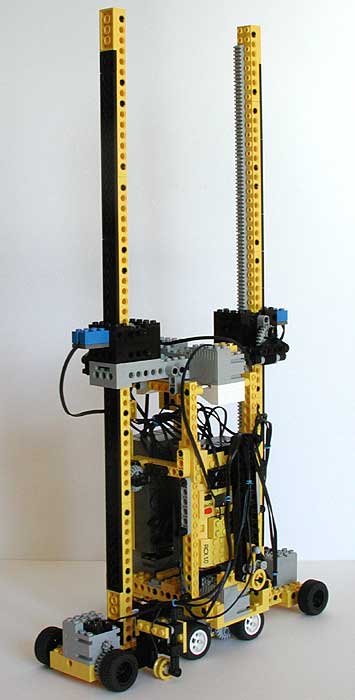
...so I modified that to 1/8 to get a more usable speed. The light sensor embedded in the guiding sleeve detects yellow plates placed at top, middle and bottom of the bars. The white slopes below the motors form a reflector to ease IR-communications between the two RCX. |
|
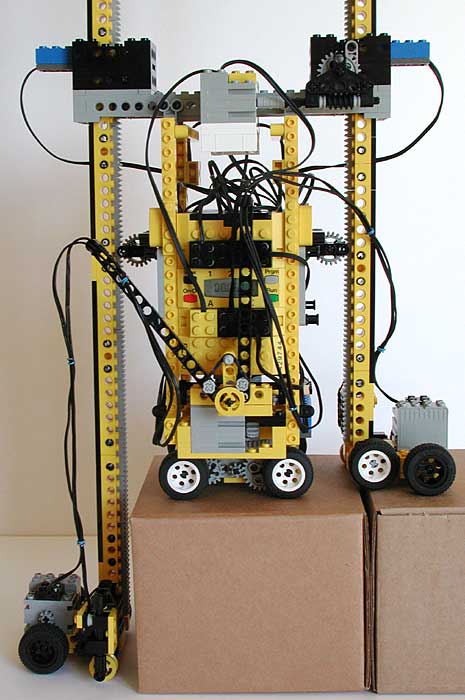
The steering carriage below the robot. Steering is a bit involved: you must lift the central part, rotate the platform in the desired direction, get the middle module down and lift the bars, then turn the top of the robot to align it with the wheels. |
|
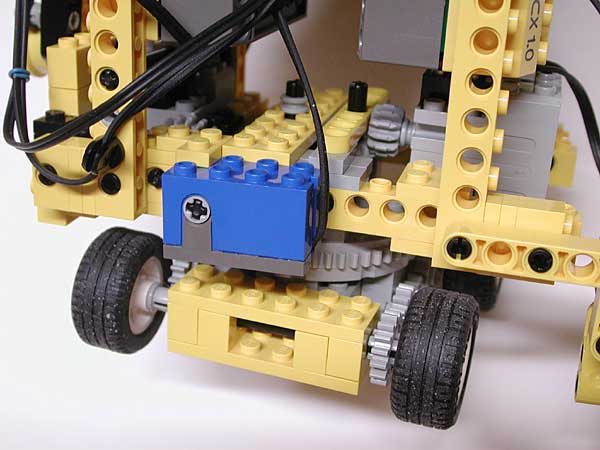
Steering is monitored by a rotation sensor. The left motor (barely visible) rotates the turntable, while the right one moves the wheels (motion is transmitted through turntable center hole). |


- Results
The complete trip (climb 4 steps, turn 180°, descend the same 4 steps) took 4 minutes and 13 seconds. A few seconds could probably have been saved with fresh batteries...
The stairs dimensions are:
- Program
Programming Ptitgneugneu was no trivial task, as sensors and motors are distributed among the two RCX that need to cooperate.The "Master RCX" controls the three propulsion motors, reads the two light sensors for bars positioning and the middle module ground detector. The "Slave RCX" drives the two lifting motors and the steering motor. Its inputs comes from front and rear bars ground detectors, and from steering rotation sensor.
The program was written in
 .
.Get the Master RCX program, and the Slave RCX program.
- Movies
(AVI movies, Divx 5.1 compression)
The movie of the complete trip.... This is a 5x accelerated movie to keep file size down (1Mb).
For those really bored but having a broadband access, here is the real-time movie (3Mb).
Note that a few seconds are missing at T=3mn, because the camera I used can't record more in one chunk.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()