![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
8
Legs Walker

I was urged to build this when Chris Magno showed his wonderful walker, inspired by Theo Jansen kinetic sculptures. This is something I wanted to do for a few years, since I met one of Theo Jansen's creatures (unfortunately it was in a museum and it was not walking).
|
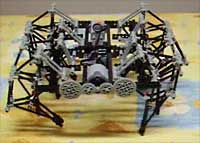
Front view. I chose a 4+4 legs design, 90° out of phase, to get a bit of the wave effect that is so impressive in Theo Jansen's design. A wider creature would be better for that, but this one already depleted my supply of axle connectors. That's why I used the old 3651 connector that I had in large supply. |
|
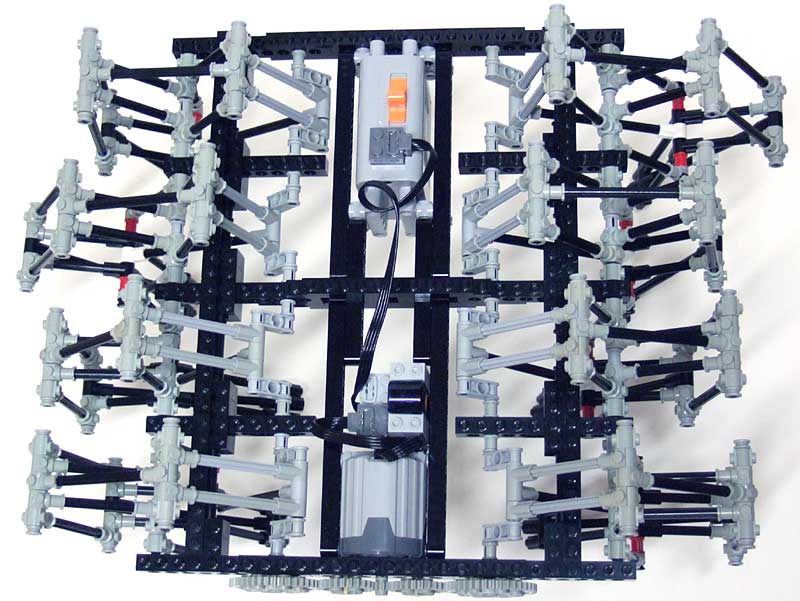
Top view. The walker is powered by Power Functions elements: a battery box, a XL motor and an IR receiver that allows to reverse direction. The design needs some improvement, the battery box is much heavier than the motor so the walker veers in that direction. The battery box should be moved towards the center of the construction. |
|
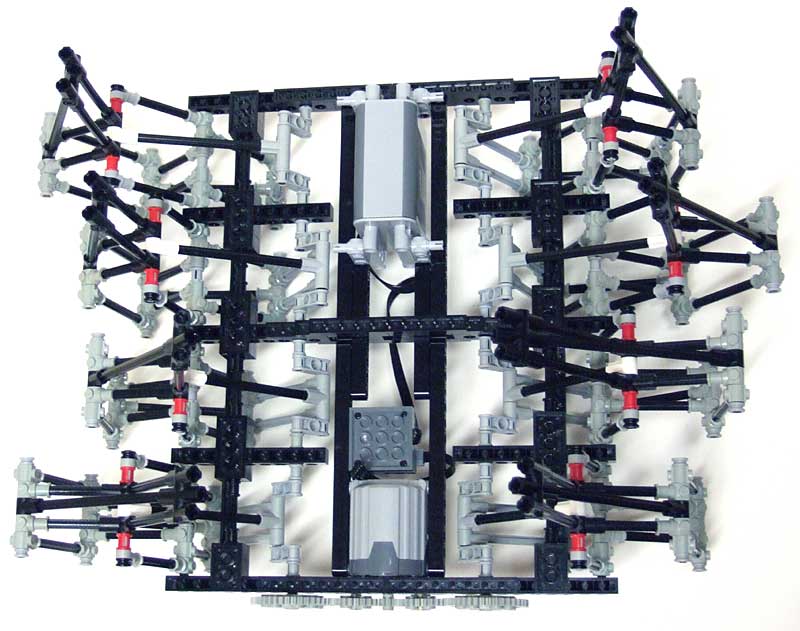
Bottom view. |
|
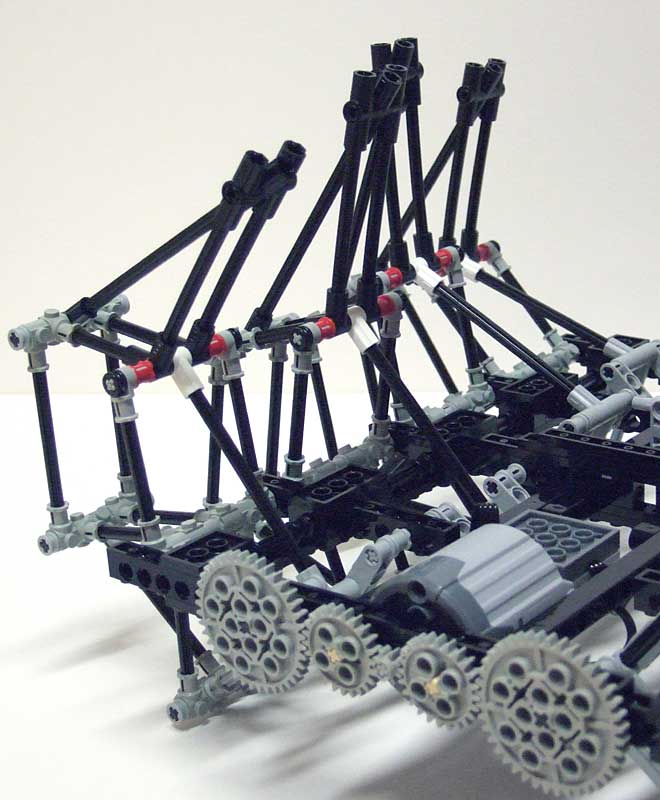
Close-ups on the legs and motor. |
|
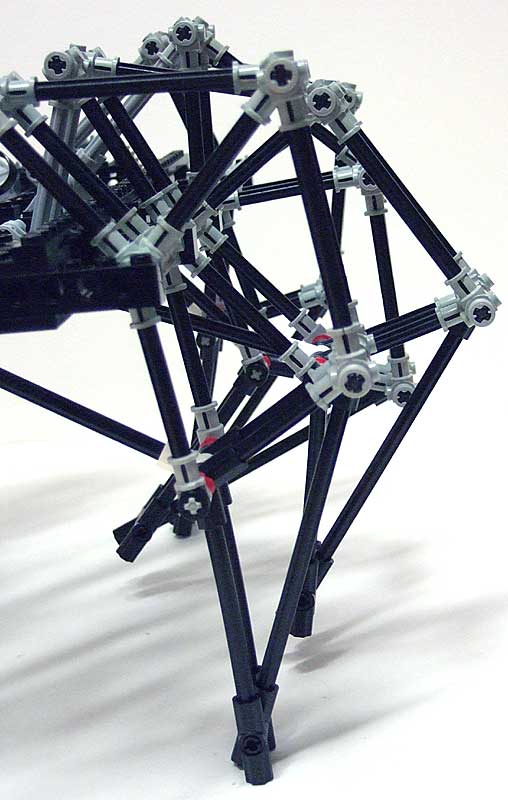
The leg design. It could be improved, as I find that legs are placed a bit too much below the body. |
|
I used Euklides 2.02 geometry freeware to simulate leg design. Here is the file matching the leg geometry I used. You can experiment with segment lengths on the right, and move the handle to see how the leg behaves. The black curve represent the movement of the tip of the leg. Design could be improved to get a flatter curve at the bottom. |
|
Movie of the walker (Divx5, 3.3Mb). |



![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()