![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Wheels,
Tyres and Traction

During a friendly sumo competition we discussed the merits of various Lego® wheels for traction power (well... for sumo this is rather pushing power!). Here are the results of a measurement campaign I did afterwards.
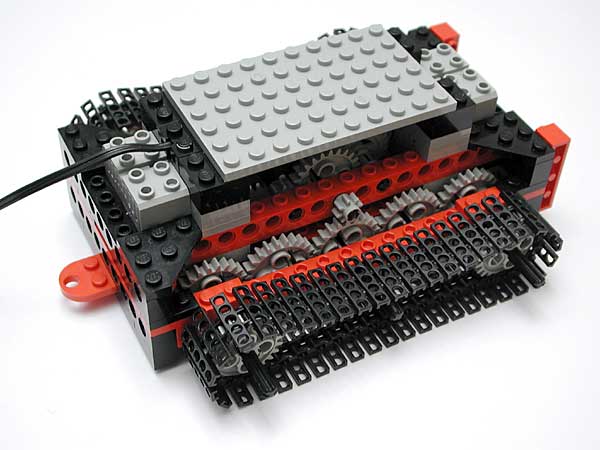
Test method
I built a simple vehicle, powered by two motors and heavily
geared down so that only adherence on ground limits pulling
power (wheels do slip). Various wheels and treads can easily
be attached to 4 or 6 driven shafts. A small electronics scale,
attached on the vehicle at one end and fixed to ground at the
other end, is used as a dynamometer.
Pulling test was performed on five different surfaces: |
|
|
|
|
|




Some more details of the test bench:
|
|
|


More wheels ?
Is it effective to add more wheels to pull more? Solid friction
laws says no, and this is clearly demonstrated in the table
below. Once wheels are slipping, traction per wheel is Tw =
K x Ww where Ww is weight per wheel and K a constant depending
on tyre and ground materials. If vehicle weight is fixed (unused
wheels were stacked on top, total weight here was 465g), increasing
wheel number decrease weight per wheel, keeping vehicle traction
constant.
Large motorcycle wheels are used in this test
(2903 + 2902 tyres).
Traction (g) |
Plywood |
Tile |
Shiny tile |
Abrasive |
Carpet |
4 wheels |
380 |
380 |
370 |
380 |
470 |
6 wheels (2 front, 4 rear) |
375 |
380 |
375 |
380 |
460 |
6 wheels (4 front, 2 rear) |
375 |
380 |
395 |
375 |
460 |
8 wheels |
385 |
395 |
375 |
390 |
460 |
Of course this applies only on a solid, reasonably even ground.
More wheels may be needed to spread load on a larger surface
(mud, sand...), but to maintain pulling capability as many of
them as possible should be driven.
More weight ?
As implied in previous experiment, a heavier vehicle has proportionaly greater pulling capability. This can be seen in the curves below.
At first
I used motorcycle wheels, but their large diameter resulted
in too much strain on the gear train and I broke an old-style
24 tooth gear (new type ones are sturdier).
More speed
?
I also tried to see if wheel rotation speed had an influence on traction. Varying motors supply voltage between 2.5V and 10V shows only a very slight increase in traction power.
Wheels comparison
The wheels and tyres were tested on different surfaces. Charts below shows friction coefficient (Traction / vehicle weight) and are sorted by decreasing average efficiency.
NOTE: Because wheel diameter is different, scale attachment was adjusted to remain as close to ground as possible. But some variation remained that may have influenced the results. So take these results with a grain of salt !
|
Short hair carpet |
|
Abrasive back of tile |
|
Varnished, shiny tile |
|
Matt tile |
|
Raw
plywood |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|





































![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()