![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Brick Sorter 2

This second version of brick sorter is closely based on the robotic arm model provided with Lego set 8094 Technic Control Center. I just added a few sensors to the base model to be able to control it with RCX.
Scanned instructions for this model can be found on Brickshelf or on Brick Builder's (images 30 to 49).
|
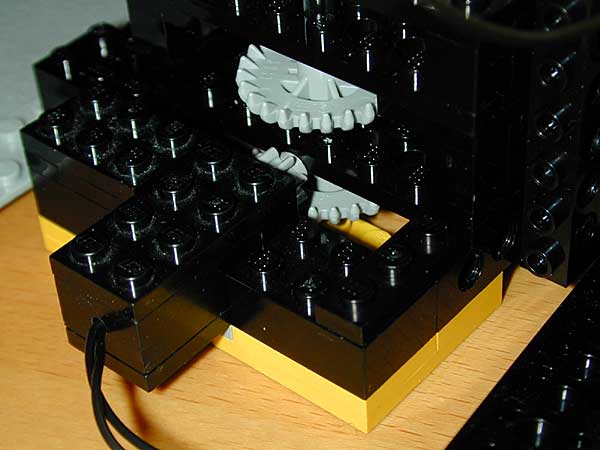
A light sensor placed at the base of brick chute measures reflected light. Note the diffusing tape placed on the sensor to minimize specular reflection. Without it, a black light can reflect a lot of light and be mistaken for a yellow one... |
|
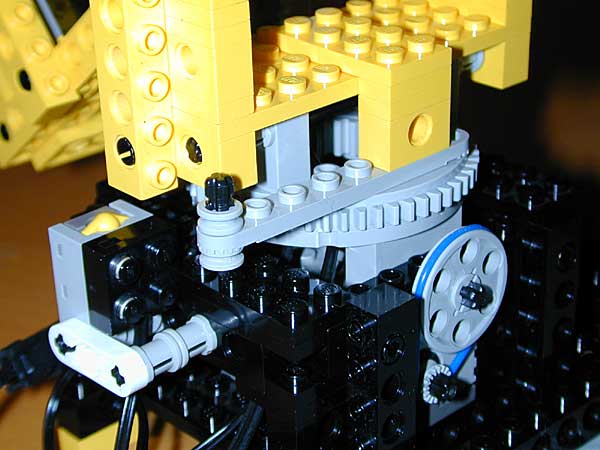
The position of the arm rotating base was determined with my home-made rotation sensor. |
|
Zero angle is fixed with a touch sensor. This touch sensor is parallel mounted with the rotation sensor, software switches mode to touch sensor raw mode while getting back home. Very low value means switch closure, rotation sensor in raw mode never returns values lower than 300. |
|
A second touch sensor enables RCX to know when the arm is in the uppermost position |
|
QuickTime movie showing 1 brick pick and place, real time (500K). |
|
Quicktime movie showing 4 bricks sort, 6 x accelerated (500K). Note that because of the imprecision of my electro-mechanical rotation sensor due to contact bounces, I had to re-calibrate arm position before each brick pick. |




![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()