![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
- High resolution (Divx5, 2.6Mb)
- Lower quality/resolution (Divx5, 420kb)
- Forward/Backward joystick value is sent as a signed value in mailbox 1 (0 in NXTiiMote NXC program)
- Left/Right is sent as a signed value in mailbox 2 (1 in NXTiiMote NXC program)
- Trigger button sends a message in mailbox 3 (2 in NXTiiMote NXC program)
- Azimuth wheel sends a signed value in mailbox 4 (3 in NXTiiMote NXC program). The value is clipped to avoid mechanical lock of the camera orientation motor.
- Level the camera a
- Start the "remote-z" program on the rover NXT.
- Establish Bluetooth link between both NXTs from the NXTiiMote (the link must be established from joystick, using slot 1 to use the programs without modifications)
- Start the NXTiiMote program (the program first checks for a valid Bluetooth connexion).
- Level the NXTiiMote
- Press trigger button
- You are now controlling the remote robot.
NXTiiMote
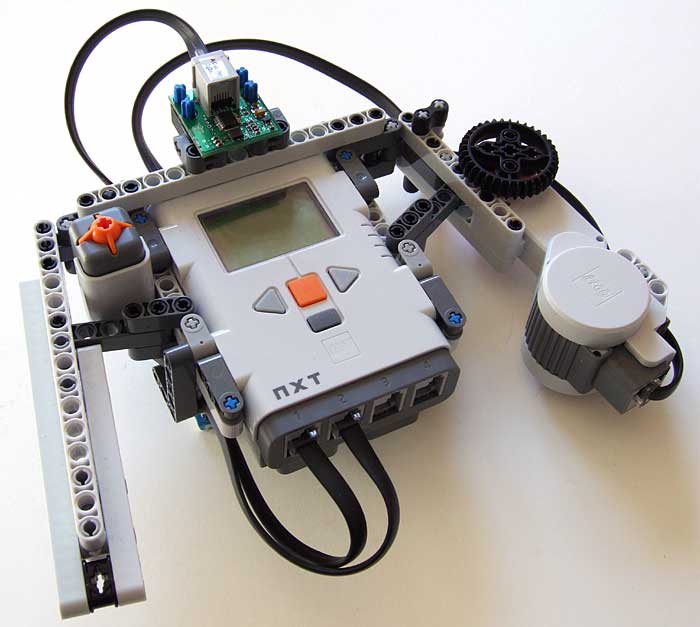
NXTiiMote is a remote control device based on a MindSensors acceleration sensor. You may control a vehicle through Bluetooth by tilting the remote, forward/backward and left/right. Additionally, a wheel and push button can control supplementary actions.
|
Right view. The wheel drives motor encoder whose position is transmitted to the remote controlled vehicle. I use it to change the azimuth of the wireless camera built on the rover. |
|
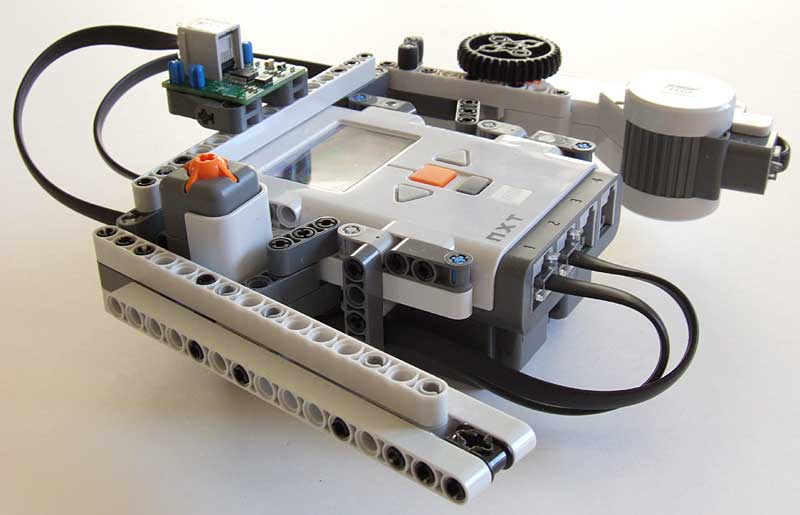
The trigger button is also used at the beginning of the program to calibrate the joystick (set the zero position). It might also be used as a "shift key", to control two actions when the trigger is released, two other actions when pressed. Here it simply triggers a R2D2 sound played by the rover |
|
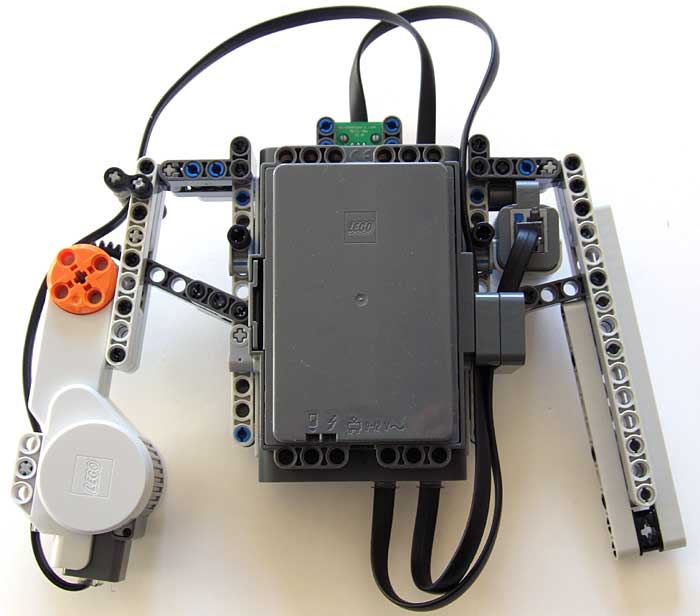
Bottom view. Here the remote is shown with Li-ion battery pack, but it works fine with regular batteries! |
|
Close-up on the acceleration sensor. I used the ACCL-Nx-3g3x (3G sensitivity, 3 Axis readings), but since only two axis are used here, the slightly cheaper 2 axis version (ACCL-Nx-2g2x) would work fine too. |
|
The rover is a slightly modified version of my Spy Camera Rover. |
|
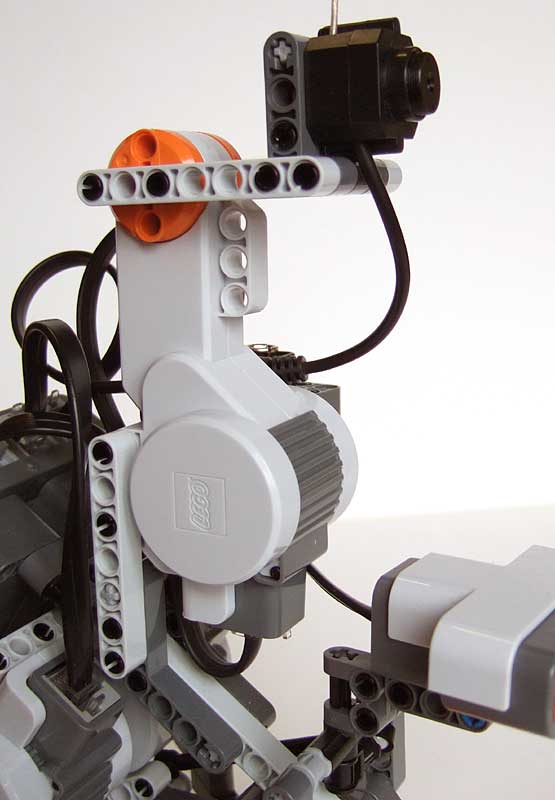
A third motor was added to allow the camera to look up and down. It is controlled by the position of the wheel on the remote. |



Video
|
Video showing how the remote orientation controls rover moves. The camera is equipped with 4 white LED headlights to improve vision in dark corners. |

Building
instructions
|
Printable building instructions (PDF, 1.6Mb). LDraw/MLCad MPD file. |

Programs
|
The NXTiiMote NXC program sends the controller orientation and wheel position to a remotely controlled NXT robot. I choose NXC because when I wrote this program NXT-G blocks to control acceleration sensors were not available. It also allowed me to experiment with NXC to NXT-G Bluetooth communications. The only catch is mailbox numbering (NXC maibox n matches NXT-G mailbox n+1). June 2008 update: Daniel Sirota sent me a version of NXTiiMote program adapted for LEGO/HiTechnic acceleration sensor. Also included here. |
|
Use the "remote-z" program on the modified Spy Camera Rover. |
Bluetooth mailbox usage:
Usage
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()