![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Barrel
Collector Robot
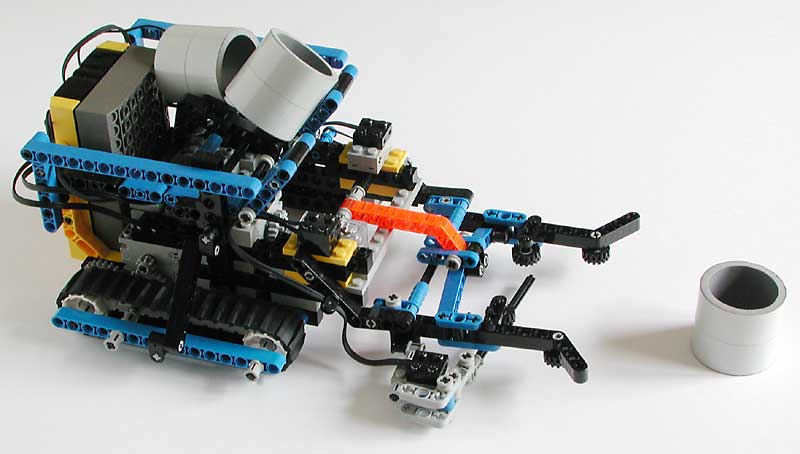
I built this robot as an application of my Laser Target Finder sensor. With the help of this sensor, the robot detects barrels (made from 40mm PVC pipe covered with reflecting tape) up to 3 meters away. Then it goes straight to them, grab them with its arm and collect them in a basket. When it sees no more barrel, after a full detection turn, the robot halts.
The barrel collecting robot can be built with
parts included in Robotics
Invention System set and Ultimate
Builders set - plus of course a Laser
Target Finder sensor!
|
Lifting a barrel. |
|
|
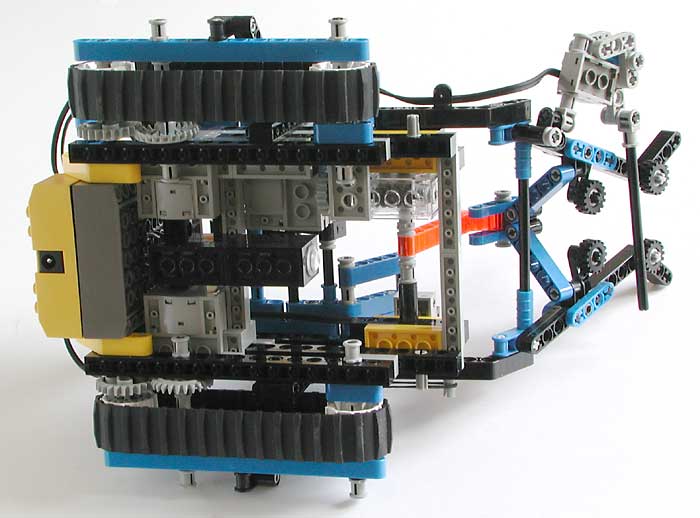
This bottom view shows the Laser Target Finder sensor. The laser beam goes out under the lifting arm. |
|
|
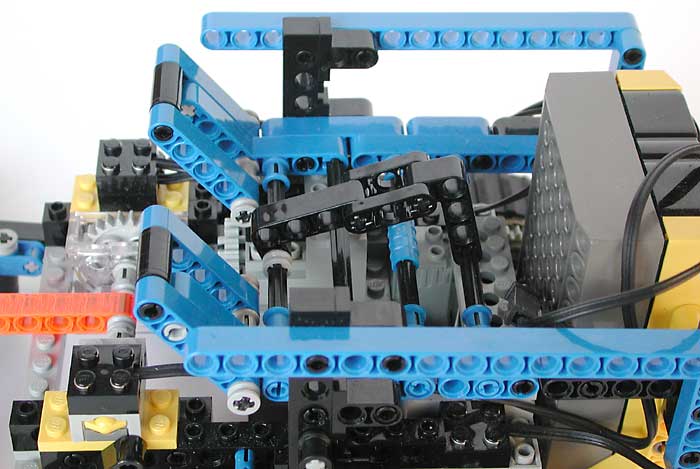
Grabber arm detail. The motor raises the orange beam, first closing the claw, then lifting the whole arm. |
|
|
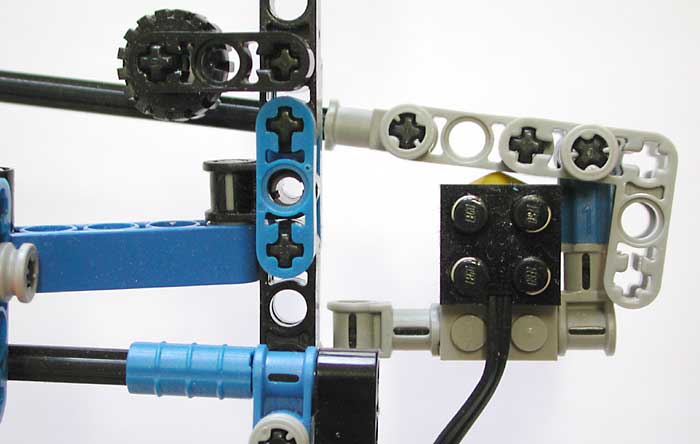
The rubber belt on the side increases claw strength at the beginning of the lifting, and eases the release of the barrel in the basket. The touch sensor above the rubber belt is activated when the arm is fully up. |
|
|
A touch sensor equipped with a lever detects the presence of a barrel within the claws. The first version used a light sensor for that function, but it was not reliable in bright ambient light. |
|
|
Close-up of the basket. The raised part in the middle prevents barrels from remaining there, blocking the grabber arm. The basket contains three barrels. |
|
|
|
The Barrel Collector Robot was featured at LegoWorld 2003. Photos courtesy JLB. |





{kind=link}
- Step
by step construction instructions
LeoCad design files are available here. A few unofficial Ldraw parts are needed, they are here.
- Programs
Get program.
program.
- Barrel Collecting Robot
with Laser Target Finding sensor in action: QuickTime
movies.


Finding and grabbing
two barrels (800Ko)Barrel collecting
(200Ko)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()