![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
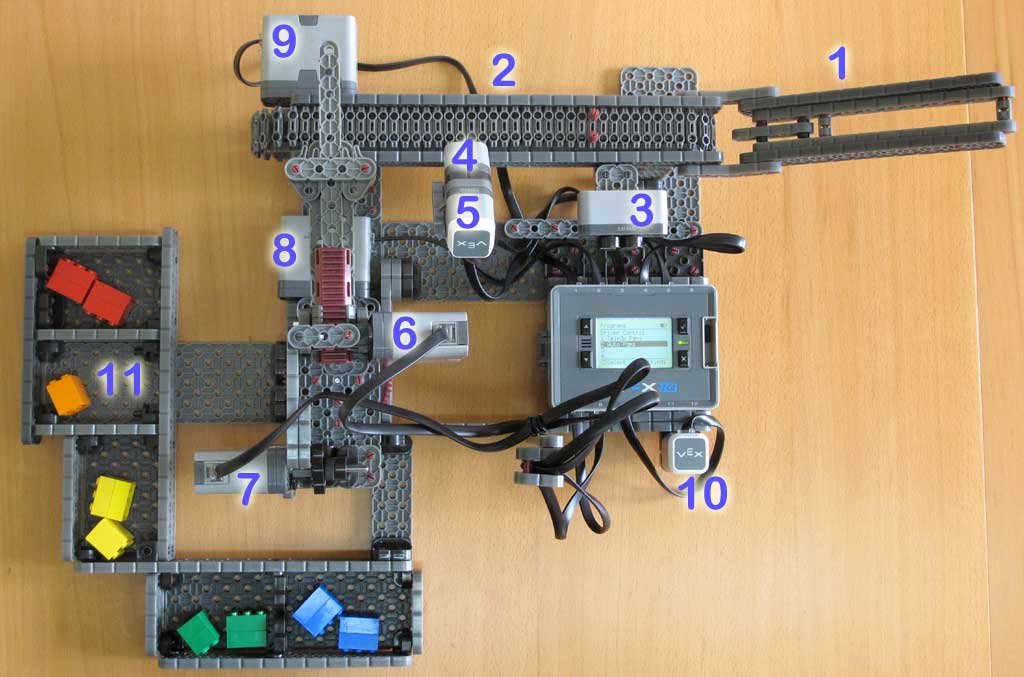
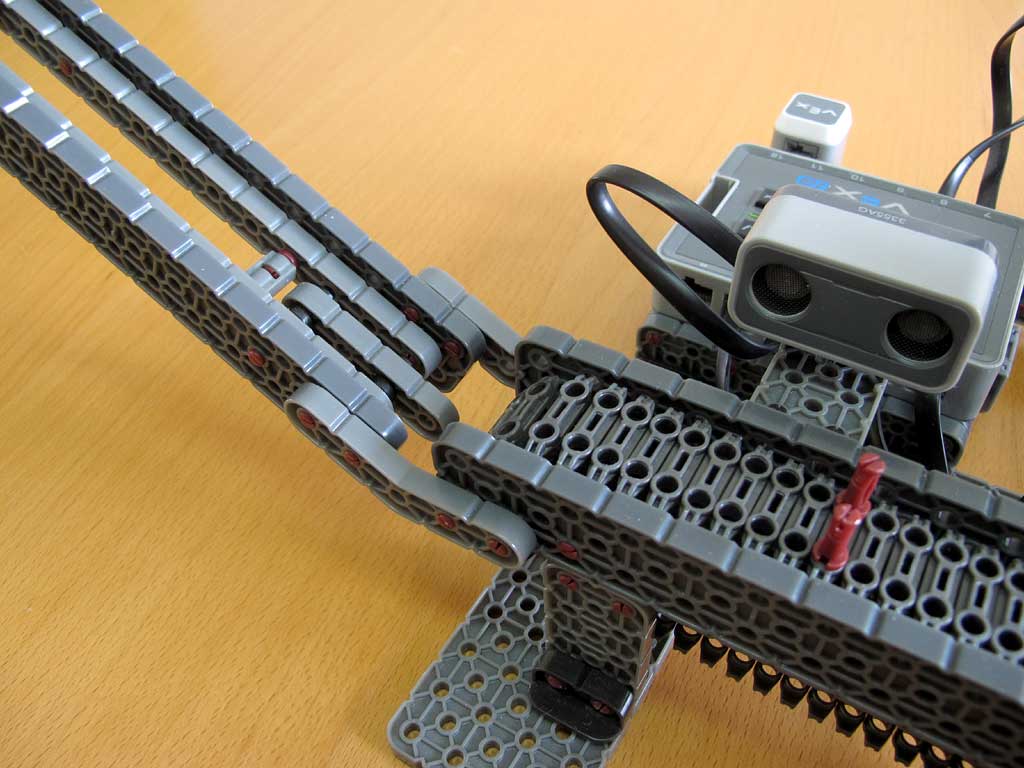
- Block chute. Blocks to be sorted are placed here.
- Conveyor belt. It picks the blocks from the chute and brings them to the distance sensor, then color sensor and picker arm. Two pins on the belt catch the blocks.
- Distance sensor. Detects blocks as they travel on the conveyor. If no block has been detected after a half belt rotation, the ramp stop, the TouchLED 10 blinks and wait for press to start again.
- Color sensor, activated when the block detected on 3 is in front.
- TouchLED, displaying detected color.
- Gripper motor
- Arm lift motor
- Arm rotation motor
- Conveyor belt motor
- Sorting restart
- Output bins
VEXsorter,
a VEX IQ color sorter
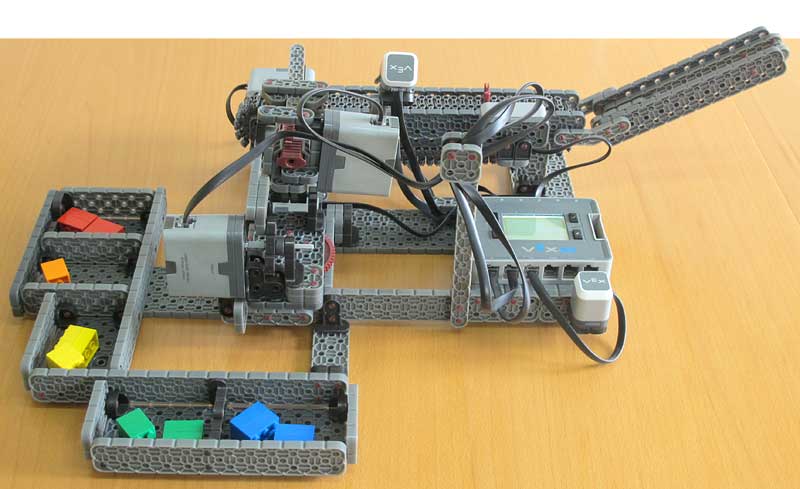
A color sorter is a nice project to evaluate the capabilities of a new robotics system, since many sensors and motors are involved. So when VEX robotics sent me their new VEX IQ kit, it was no surprise I choose to build a color sorter!
|
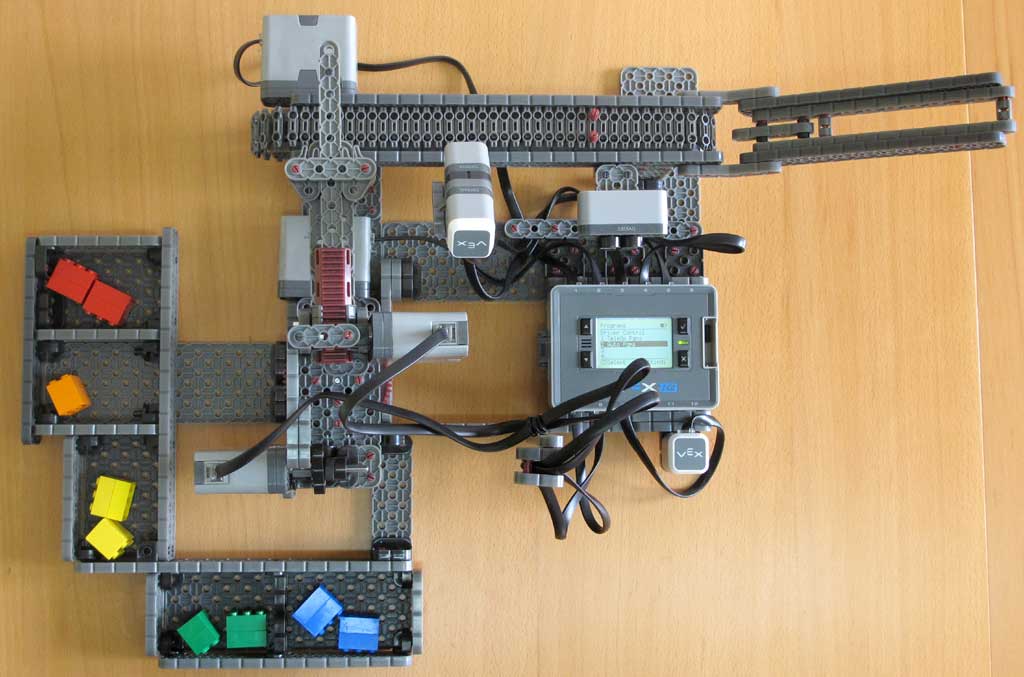
Top view |
|
|
Top view again, with detailed key elements: |
|
|
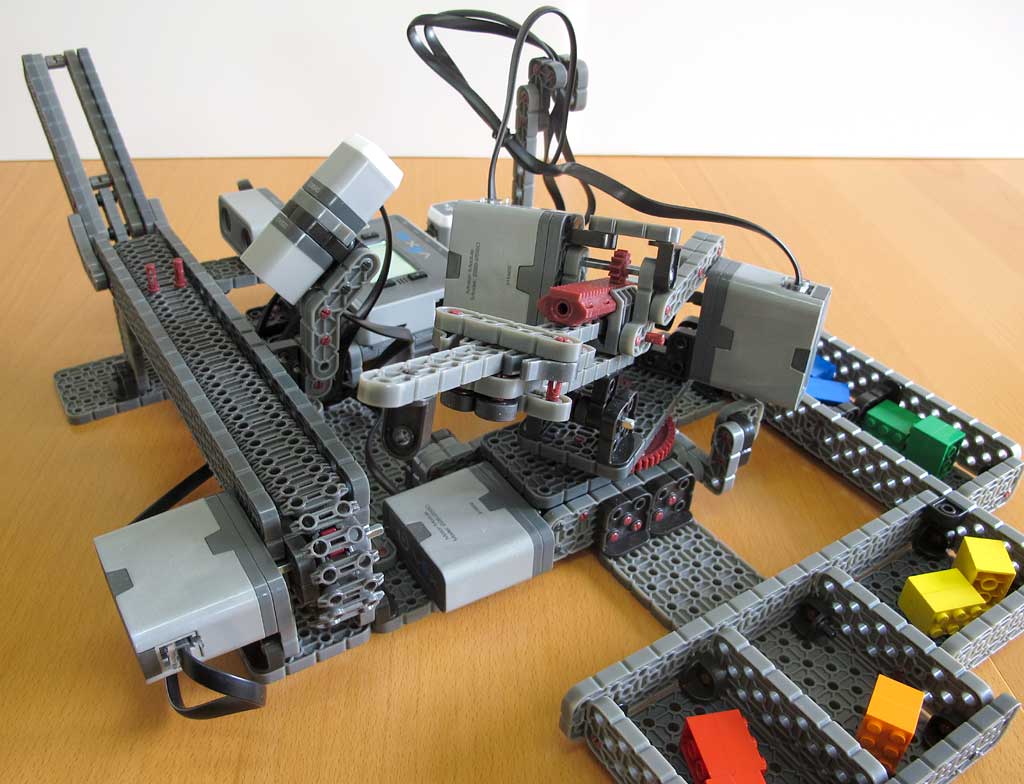
Rear back view |
|
|
Details of the block chute and block catching pins |
|
Video
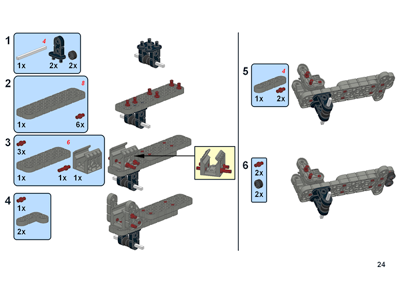
Building instructions
The creation of this robot was also the opportunity to test the LDraw models I created for VEX IQ system. As usual, I created the model using SR3D builder, the cables were done with LSynth, stepping the model was done in MLCad and building instructions themselves were generated with LPub4.
|
VEXsorter printable building instructions (PDF, 6Mb). LDraw/MLCad MPD file. |
VEX Sorter Connection Chart |
|
Device |
Port |
Color sensor |
3 |
RobotC programs
|
VEXsorter program sorts 5 colors (red, orange, yellow, green and blue) |
|
2-tasks VEXsorter program does the same, but using two tasks, it is able to sort faster. One task moves brick on the conveyor and reads color, the other one moves the picker arm. |

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()