![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
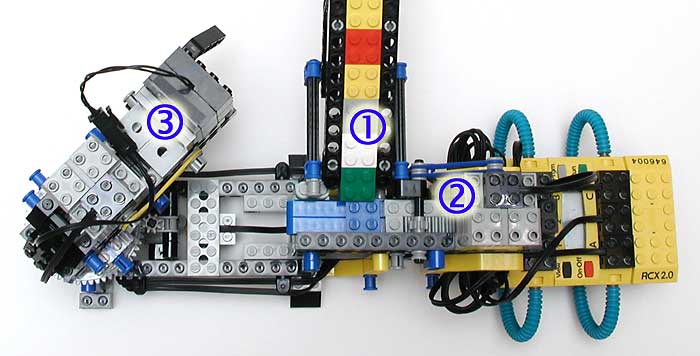
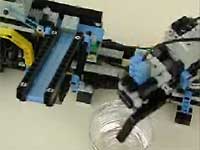
- The brick chute holds the 2x2 bricks to be sorted. Gravity lets them go down as they are removed from bottom of stack.
- The brick injector pushes bricks in rotating arm (3) under the color sensor or light sensor
- The rotating arm carries the color sensor and a brick ejector that pushes bricks in output bins.
Brick Sorter 3
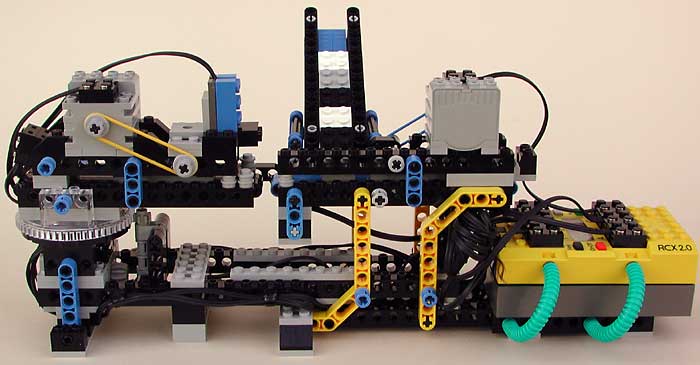
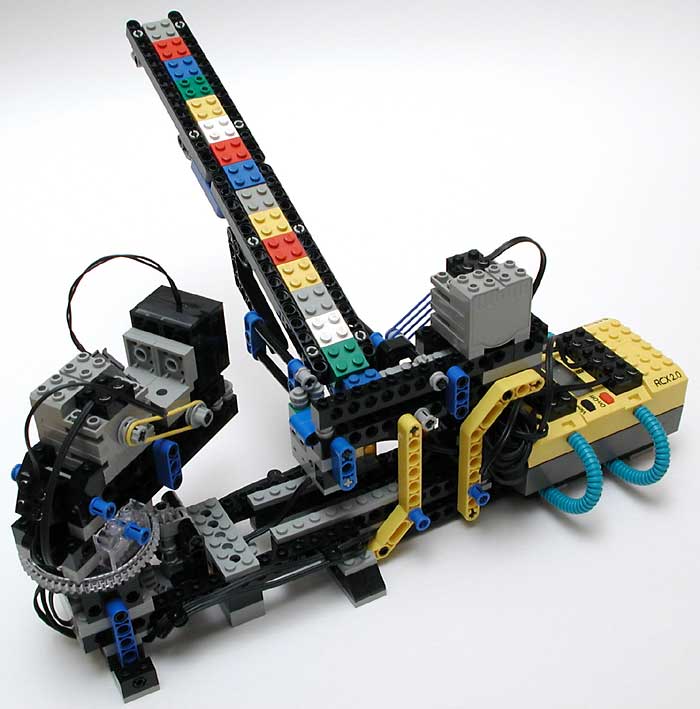
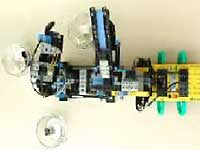
This third implementation of brick sorter was originally created to test my color sensor. But of course it can be equipped with regular light sensor with limited sorting capability. It's construction uses only parts included in Robotics Invention System and Ultimate Builders Set.
|
|
|
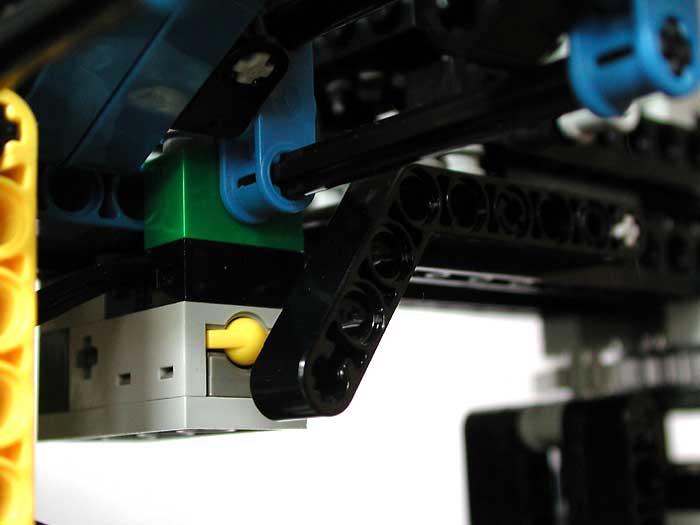
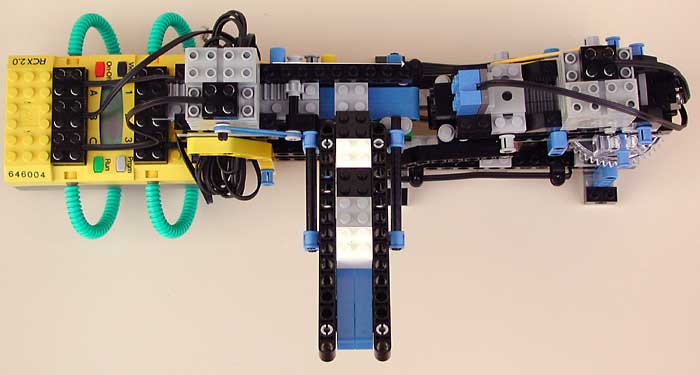
The finger out of arm closes the contact of a touch sensor in neutral position. |
|
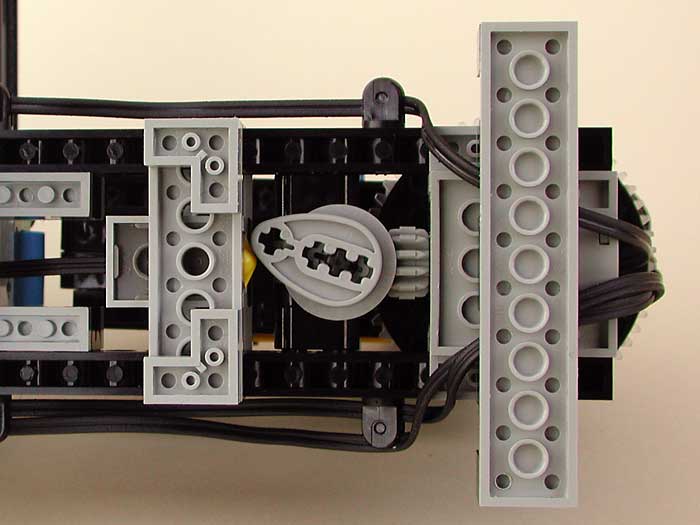
This bottom view shows the cam of rotating arm and touch sensor. They provide 6 different positions for plus neutral so we can sort 6 different colors. |
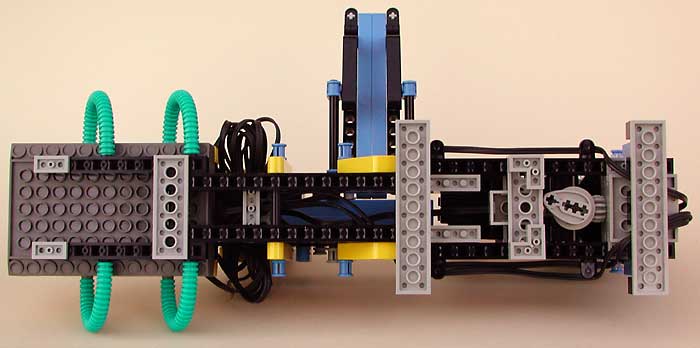
|
Top and bottom view. |
|
Sorter 3 equipped with color sensor and brick chute extension. |
- Step by step construction instructions
Update : I forgot to provide LeoCad files, they are here.
- Programs
Since I just got the new RIS 2.0 programming software, I decided to give it a try. It is a tremendous improvement over RIS 1.5: it gives you the possibility to use variables (how can you program without that ???), and is much more responsive (no more cute animations that are fun the fisrt 3 seconds of use, and so irritating the rest of time)
- Sorter3-fixed_order: this program is for Sorter3 equipped with light sensor. Black bricks are placed in the first bin, grey one in the second, white bricks in the third. The thresholds between colors are fixed in the program and need to be modified according to your light sensor sensitivity. 8 bricks are sorted.
 Sorter3:
Much more ambitious program, this one gets the first three
bricks in the chute and measures their brightness (with
light sensor). The order of these bricks determines the
sort order. Clearly we reach here the limits of RIS 2.0
programming environment: the lack of arrays yields a complicated
sorting tree (see screen capture), and I had to resort to
dirty tricks to get round a strange restriction: the number
of instructions in a program stack is limitated !!!
Sorter3:
Much more ambitious program, this one gets the first three
bricks in the chute and measures their brightness (with
light sensor). The order of these bricks determines the
sort order. Clearly we reach here the limits of RIS 2.0
programming environment: the lack of arrays yields a complicated
sorting tree (see screen capture), and I had to resort to
dirty tricks to get round a strange restriction: the number
of instructions in a program stack is limitated !!!
- Byron sent me his NQC version of Sorter3 program, using a rotation sensor for positioning.
- For the color sensor version of the program, I went
back to
 ...
There are the limitations mentioned above, plus the impossibility
of switching a sensor port between active and passive mode,
the key to color sensor
working.
...
There are the limitations mentioned above, plus the impossibility
of switching a sensor port between active and passive mode,
the key to color sensor
working.
Sorter3-color_sensor works like sorter 3 except that it can sort 6 different colors instead of 3. Moreover, if no black bricks are used, the sorter halts automatically when the supply is empty (background is black).
- Movies
Brick sorter 3 with light sensor (350k).
Brick injection end ejection (90k).

Brick sorter 3 with color sensor, accelerated movie (650k).



![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()